structure{ region{} } - shape objects¶
Every region needs to have a certain shape, which can be defined by several objects. It consists of a certain material and/or contact, and it can have a doping profile.
Any subsequently defined region overwrites previously defined ones in the overlapping area. For exclusive properties such as material and contact, this implies a substitution of the old value.
Concerning doping, the new profile is added to any previously defined one.
Geometric objects may also be defined such that they are partially, mostly, or completely outside of the simulation region. Only the parts of structures which are inside of the simulation region will be used, everything else is ignored.
The following structures are supported. These are put under structure{ region{} }.
1D simulations¶
line{}¶
1D object. a line from start to end point along the specified direction
- Example
2D simulations¶
rectangle{}¶
2D object, a rectangle defined by two lines along the x and y directions
- Example
circle{}¶
2D object, a circle is defined by its center and radius
- Example
trapezoid{}¶
2D object e.g. a simple trapezoid along the x axis
- Example
Note
Exactly one of the elements base_x and base_y has to be set by two equal numbers to define the base line.
The same holds for top_x and top_y to define the top line.
semiellipse{}¶
2D object, e.g. a simple semiellipse along the x axis
- Example
Note
Exactly one of the elements base_x, and base_y has to be set by two equal numbers to define the base line.
triangle{}¶
2D object, a triangle defined by its 3 vertices
- Example
polygon{}¶
2D object, a polygon defined by its vertices. If the first and the last defined vertex are not identical, then they are joined with a line.
- Example
regular_polygon{}¶
2D object, a polygon with equal angles and equal side lengths. It is defined by its center, one vertex and the number of facets.
- Example
hexagon{}¶
2D object, a polygon with equal angles and equal side lengths and 6 facets. It is defined by its center and one corner vertex.
- Example
3D simulations¶
cuboid{}¶
3D object, a cuboid defined by three lines along the x, y and z directions
- Example
sphere{}¶
3D object, a sphere is defined by its center and radius
- Example
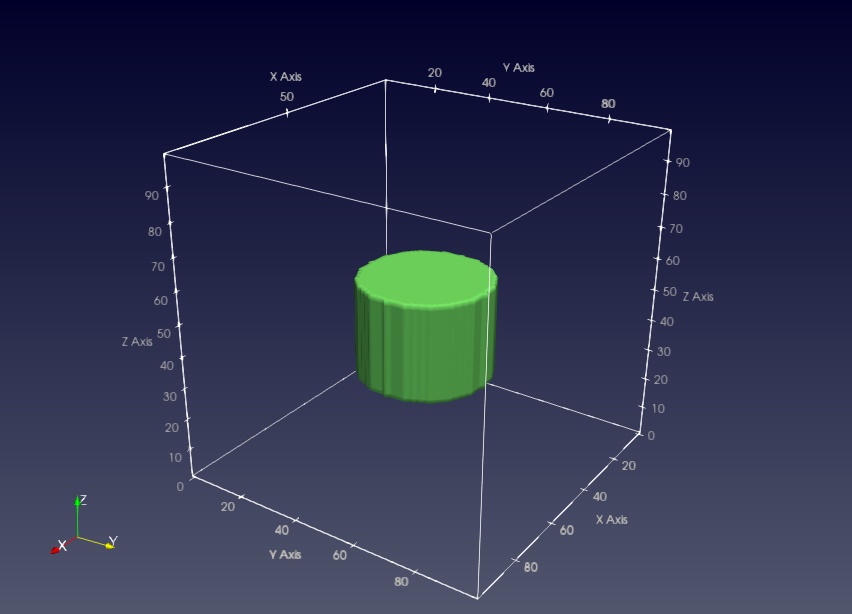
cylinder{}¶
3D object, e.g. a cylinder with a freely oriented axis
- Example
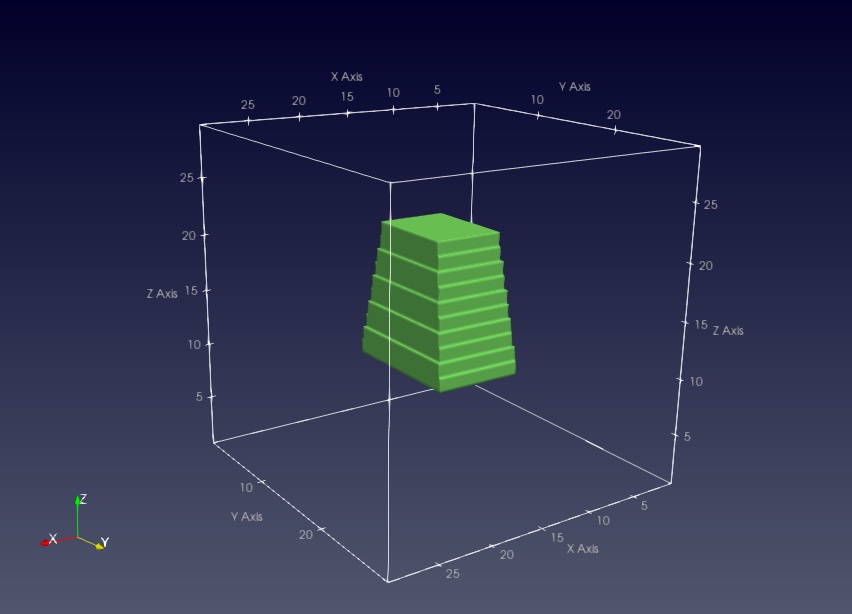
obelisk{}¶
3D object, e.g. an obelisk parallel to the (x,y) plane with top below bottom
- Example
Note
Exactly one of the elements base_x, base_y and base_z has to be set by two equal numbers to define the base plane.
The same holds for top_x, top_y and top_z to define the top line.
hexagon_obelisk{}¶
3D object, an obelisk with its base and top planes given by hexagons
- Example
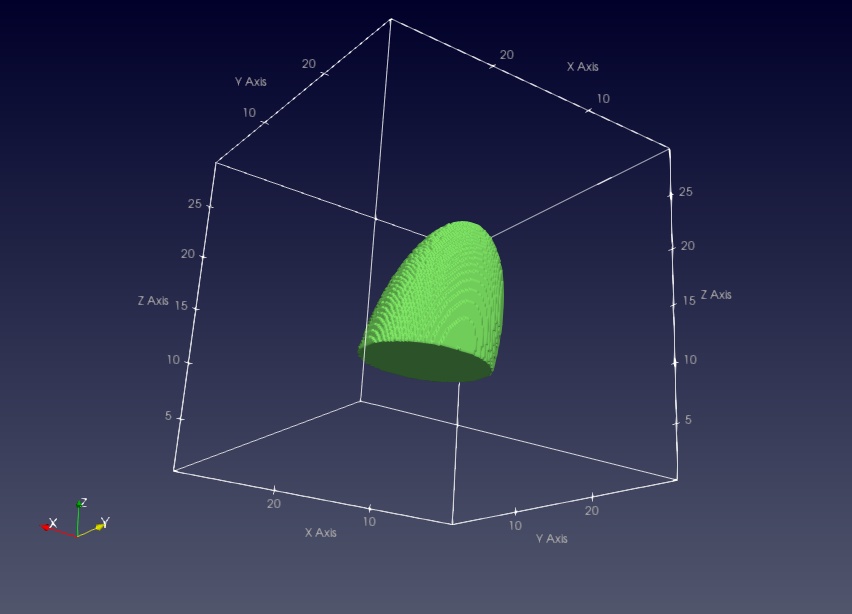
semiellipsoid{}¶
3D object, e.g. a semiellipsoid parallel to the (y,z) plane with top below bottom
- Example
Note
Exactly one of the elements base_x, base_y, and base_z has to be set by two equal numbers to define the base plane.
cone{}¶
3D object, e.g. a cone parallel to the (x,z) plane
- Example
Note
Exactly one of the elements base_x, base_y, and base_z has to be set by two equal numbers to define the base plane.
polygonal_prism{}¶
3D object (= 2D polygon with extension into the perpendicular direction; vertices define the circumference of the prism.)
- Example
regular_prism{}¶
3D object (= 2D regular_polygon with extension into the perpendicular direction; center and/or corner define the circumference of the prism.)
- Example
hexagonal_prism{}¶
3D object (= 2D hexagon with extension into the perpendicular direction; center and/or corner define the circumference of the prism.)
- Example
Note
Per default, all prisms (polygonal_prism, regular_prism, hexagonal_prism) are assumed to extend along the respective layer thickness direction (i.e. normal to the defining coordinate plane). But, using the axis vector, an arbitrary axis (inclination) direction for the prism can be defined in the simulation system. The axis vector does not need to be normalized, however, its orientation defines which side of the prism layer is the base to be used as reference for the inclination.
For example,
regular_prism{
z = [50, -70] # automatically reordered to [-70, 50]
center{ x = 10 y = 10 }
corner{ x = 30 y = 40 }
number_of_side_facets = 8 # regular octagon wanted
axis = [15 , 25 , 120] # no normalization needed here
}
defines a regular octahedral prism extending primarily in the z direction (end surfaces are x-y planes at z = -70 and z = +50).
Since the axis points upwards in z direction (z = 120), the base surface to be taken as reference is the lower x-y plane at z = -70.
There, the octagon center is at { x = 10 y = 10 } with an octagon corner at { x = 30 y = 40 }
With the axis vector defined as above, we then find for the x-y plane at z = +50
the octagon center at
{ x = 10+15 y = 10+25 }andthe octagon corner at
{ x = 30+15 y = 40+25 }.
In analogy to polygon, we provide pyramidal structures.
polygonal_pyramid{}¶
- Example
regular_pyramid{}¶
- Example
hexagonal_pyramid{}¶
- Example
Note
Similar to the prismatic structures, use x, y, and z at the beginning of the respective primitive to define the extent in the desired height direction, use vertex, center, and/or corner to define the circumference of the base of the pyramid, and apex to define the position of the apex of the pyramid.
Note that, for polygonal_pyramid (as for polygon), the vertices must be ordered either clockwise or counterclockwise, otherwise the behavior during structure generation will be undefined.
Also note that if the apex is located outside of the interval defined by x, y, or z at the beginning in the height direction, the pyramid will be truncated. Also, the pyramid will point upwards if the apex is above the center of said interval (and the lower plane is used as base), and will point downwards if the apex is below the center (and the upper plane is used as base). And in case a symmetric regular pyramid is desired, please make sure to laterally align the apex with the center point.
For example
regular_pyramid{
z = [70, -70]
center{ x = 10 y = 10 }
corner{ x = 70 y = 70 }
number_of_side_facets = 8
apex{ x = 10 y = 10 z = 120}
}
defines a regular octahedral pyramid with base at z = -70, centered there at { x = 10 y = 10 } and a corner there at { x = 70 y = 70 }.
The apex of the pyramid would be at { x = 10 y = 10 z = 120}, making the structure rotationally symmetric, except that the pyramid is truncated at z = +70.
Thus, a rotationally symmetric truncated octahedral pyramid has been defined.
pyramid{}¶
3D object, e.g. a pyramid with 4 freely defined corner points
- Example
Note
When periodic{...} is used, objects extending over an edge of the simulation region will not automatically be continued on the opposite side.
If such objects are present in a periodic simulation, for each periodic coordinate direction (x, y or z), please either define a repetition
(using the size of the simulation region as shift with max = 1 and/or min = 1 as needed),
or extend an already present repetition to the edge of the simulation region (by increasing min and max as needed).